GAMES101
Lecture1: intro
计算机图形学
使用计算机synthesize(合成) manipulate(操作) 可视化信息
why study computer graphics?
- Application
- video games 电子游戏
- animations 动画
- visualization 可视化
- virtual reality
- augmented reality 增强现实
- digital illustration 数码插画
- simulation 模拟
- graphical user interfaces 图形用户界面
- typography 排版
- technical chanllenges
Course topics
Rasterization 光栅化
project geometry primitives (3D triangles / polygons) onto the screen
将几何图形(3D三角形 / 多边形)投射到屏幕上
break projected primitives into fragments (pixels)
将投影图元分解到片段(像素)
gold standard in video games (real-time applications)
curves and meshes 曲线和栅格
- 怎样represent geometry in CG
ray tracing 光线追踪
- shoot rays from camera though each pixel
- calculate intersection and shading 交叉点和阴影
- continue to bounce the rays till they hit light sources
- gold standard in animations / movies (offline离线 application)
- shoot rays from camera though each pixel
animation simulation
- key frame animation 关键帧动画
- mass-spring system 弹簧振子系统
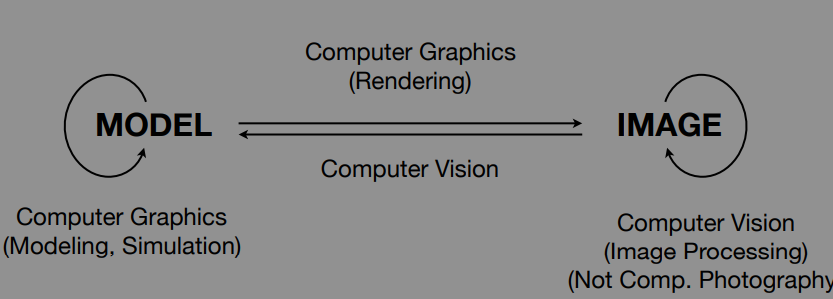
differences between cg and cv
No clear boundaries
Lecture2: review of linear algebra
Graphics’ dependcies
- basic mathematics
- Linear algebra 线性代数
- mostly dependent on linear algebra
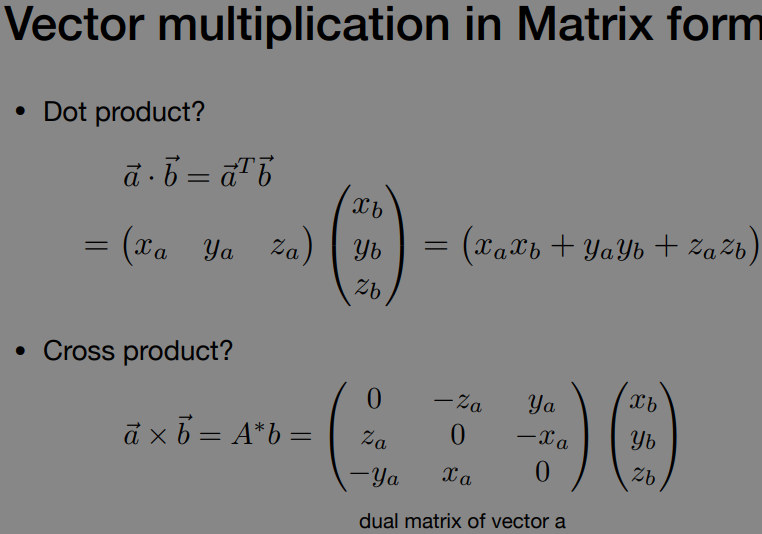
- vectors(dot products点乘,cross products叉乘
- An operation like translating or rotating objects can be matrix-vector multiplication
- matrices 矩阵(复数
- calculus 微积分
- statistics 统计
- Linear algebra 线性代数
- basic physics
- Optics, 光学的
- Mechanics 机械的
- misc 杂项
- Numerical analysis 数值分析
- signal processing 信号处理
- aesthetics 审美
vectors
noting: 只记了part
unit vector
- 单位向量,
- 用来代表方向
dot product in graphics
$\vec{a}\cdot\vec{b} = |\vec{a}|\cdot|\vec{b}|cos\theta$
Find angle between two vectors (e.g. cosine of angle between light source 光源 and surface表面)
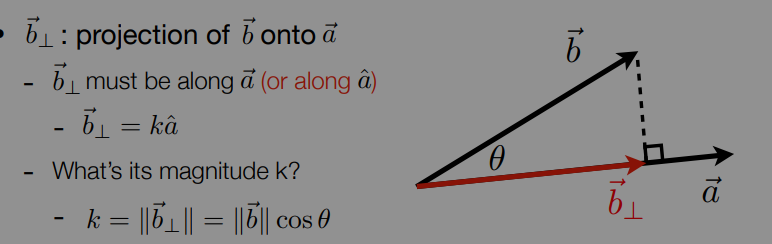
Finding projection of one vector on another
measure how close two directions are
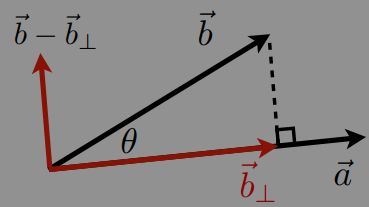
decompose分解 a vector
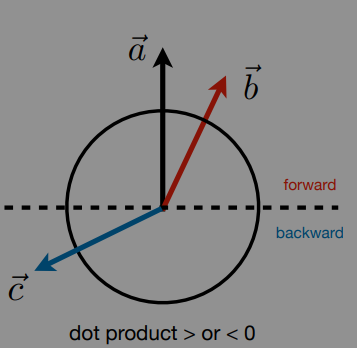
determine forward or backward
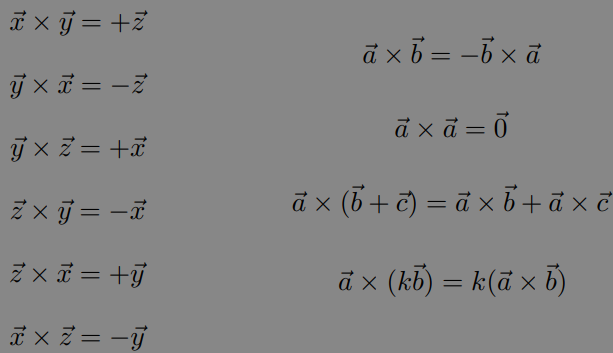
cross product in graphics
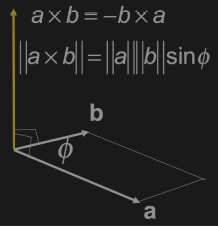
- Direction determined by right-hand rule
- Useful in constructing coordinate systems (later)
- Determine left / right
- Determine inside / outside
- Orthonormal bases and coordinate frames 正交基底和坐标系
- Critical issue is transforming between these systems/ bases
matrices
- $(AB)^{T} = B^{T}A^{T}$
- $AA^{-1} = A^{-1}A = I$
- $(AB)^{-1} = B^{-1}A^{-1}$
In Graphics, pervasively used to represent transformations
- translation, rotation,shear剪切,scale缩放
Lecture 3: Transformation
why study transformation
- modeling
- translation
- rotation
- scaling
- viewing
- 3D (projection)
- 2D (projection)
2D transformations:
representing transformations using matrices
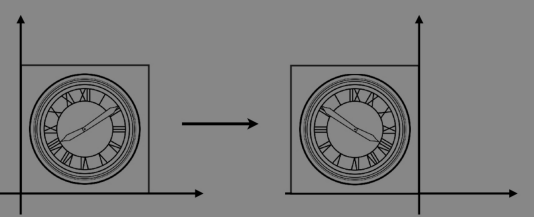
rotation
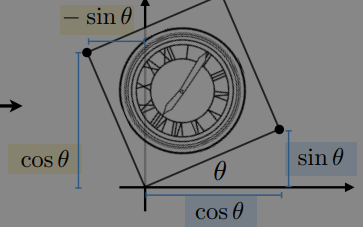
- $R_{\theta} = \begin{bmatrix} cos\theta & -sin\theta \ sin\theta & cos\theta \end{bmatrix} $
- $R{-\theta} = \begin{bmatrix} cos\theta & sin\theta \ -sin\theta & cos\theta \end{bmatrix} = R{\theta}^{T} = R_{\theta}^{-1}(by \quad definition) $
- 正交矩阵: A·A^T^ = E
- 默认绕原点旋转
- 默认逆时针旋转
scale matrix
$\begin{bmatrix} x^{‘} \ y^{‘} \end{bmatrix} = \begin{bmatrix} s{x} & 0 \ 0 & s{y} \end{bmatrix}\begin{bmatrix} x \ y \end{bmatrix}$
reflection matrix 反射(镜像)矩阵
$\begin{bmatrix} x^{‘} \ y^{‘} \end{bmatrix} = \begin{bmatrix} -1 & 0 \ 0 & 1\end{bmatrix}\begin{bmatrix} x \ y \end{bmatrix}$
shear matrix
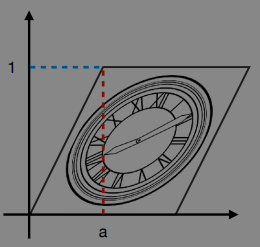
$\begin{bmatrix} x^{‘} \ y^{‘} \end{bmatrix} = \begin{bmatrix} -1 & a \ 0 & 1\end{bmatrix}\begin{bmatrix} x \ y \end{bmatrix}$
- Hints:
- horizontal shift is 0 at y = 0
- horizontal shift is a at y = 1
- vertical shift is always
- Hints:
Linear transforms
- 线性变换:可以用一个矩阵表示的变换
- x’ = ax + by
- y’ = cx + dy
- $\begin{bmatrix} x^{‘} \ y^{‘} \end{bmatrix} = \begin{bmatrix} a & b \ c & d \end{bmatrix}\begin{bmatrix} x \ y \end{bmatrix}$
Homogeneous coordinates 齐次坐标
Why homogeneous coordinates
for example: translation
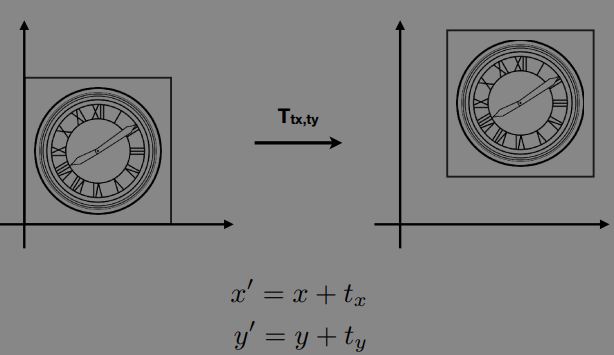
$\begin{bmatrix} x^{‘} \ y^{‘} \end{bmatrix} = \begin{bmatrix} a & b \ c & d \end{bmatrix}\begin{bmatrix} x \ y \end{bmatrix} + \begin{bmatrix} t{x} \ t{y} \end{bmatrix} $
so, translation is not linear transform!
因为平移变换不能直接用一个矩阵表示,必须加一个向量;
add a third coordinates
引入齐次坐标可以解决问题,让平移也能只用一个矩阵表示
2D point = (x,y,1)^T^
2D vector = (x,y,0)^T^
向量 + 向量,结果齐次项是0,还是向量
点 - 点,得到的是一个向量,齐次项也变成0
点 + 向量,表示一个点的移动,结果 还是点 !
点 + 点是什么呢?齐次项变成2。将所有项除以2,齐次项又变为1 。所以点 + 点结果实际上是两个点的中点。
Affine transformation 仿射变换
仿射变换:先线性变换再加上一次平移
$\begin{bmatrix} x^{‘} \ y^{‘} \ 1 \end{bmatrix} = \begin{bmatrix} a & b & t{x}\ c & d & t{y} \ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \ y \ 1 \end{bmatrix} $
scale
$ S(s{x}, s{y}) = \begin{bmatrix} s{x} & 0 & 0 \ 0 & s{y} & 0 \ 0 & 0 & 1 \end{bmatrix}$
rotation
$ R(\alpha) = \begin{bmatrix} cos\alpha & -sin\alpha & 0 \ sin\alpha & cos\alpha & 0 \ 0 & 0 & 1 \end{bmatrix}$
translation
$ T(t{x}, t{y}) = \begin{bmatrix} 1 & 0 & t{x} \ 0 & 1 & t{y} \ 0 & 0 & 1 \end{bmatrix}$
transform ordering matters
- matrix multiplication is not commutative 可交换的
composing transforms
decomposing complex transforms
- translate center to origin
- rotate
- translate back

which means $T(c) · R(\alpha) · T(-c)$
分解:变换可以分解,注意先后顺序是从右到左
2D变换矩阵(缩放,旋转,平移变换)
Lecture 4: Transformation Cont
3D transformations
3D point = (x,y,z,1)^T^
3D vector = (x,y,z,0)^T^
$\begin{bmatrix} x^{‘} \ y^{‘} \ z{‘} \ 1 \end{bmatrix} = \begin{bmatrix} a & b & c & t{x}\ d & e & f & t{y}\g & h & i & t{z} \ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \ y \z \ 1 \end{bmatrix} $
三维空间中的齐次变换,最后一行和二维变换类似,是0 0 0 1,平移还是在矩阵最后一列
对于仿射变换,是先应用线性变换,再加上平移
what is order?
linear transform first or translation first?
scale
$S(s{x}, s{y},s{z}) = \begin{bmatrix} s{x} & 0 & 0 & 0\ 0 & s{y} & 0 & 0\0 & 0 & s{z} & 0 \ 0 & 0 & 0 & 1 \end{bmatrix} $
translation
$T(t{x}, t{y}, t{z}) = \begin{bmatrix} 1 & 0 & 0 & t{x}\ 0 & 1 & 0 & t{y} \0 & 0 & 1 & t{z} \ 0 & 0 & 0 & 1 \end{bmatrix} $
rolation
- rolation around x-, y-,or z-axis

- 绕哪个轴旋转,哪个坐标就不变
不过𝑅𝑦矩阵稍微不同,其他两个都是右上角𝑠𝑖𝑛是负的,只有他是左下角𝑠𝑖𝑛是负的 因为𝑥叉乘𝑦得到𝑧,𝑧叉乘𝑦得到𝑥,但是𝑧叉乘𝑥得到𝑦(而不是𝑥叉乘𝑧),所以是反的
$R{xyz}(\alpha, \beta, \gamma) = R{x}(\alpha)R{y}(\beta)R{z}(\gamma)$
Viewing (观测) transformation
View (视图) / Camera transformation
- Think about how to take a photo
- Find a good place and arrange people (model transformation)
- Find a good “angle” to put the camera (view transformation)
- Cheese! (projection transformation)
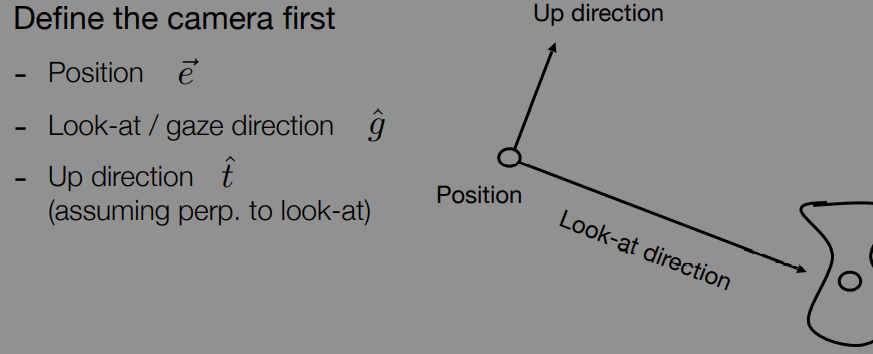
- 定义相机
- 位置
- 往哪看
- 向上方向
- 现实中是移动相机,变换景物
- 图形学中,相机不动,永远在原点
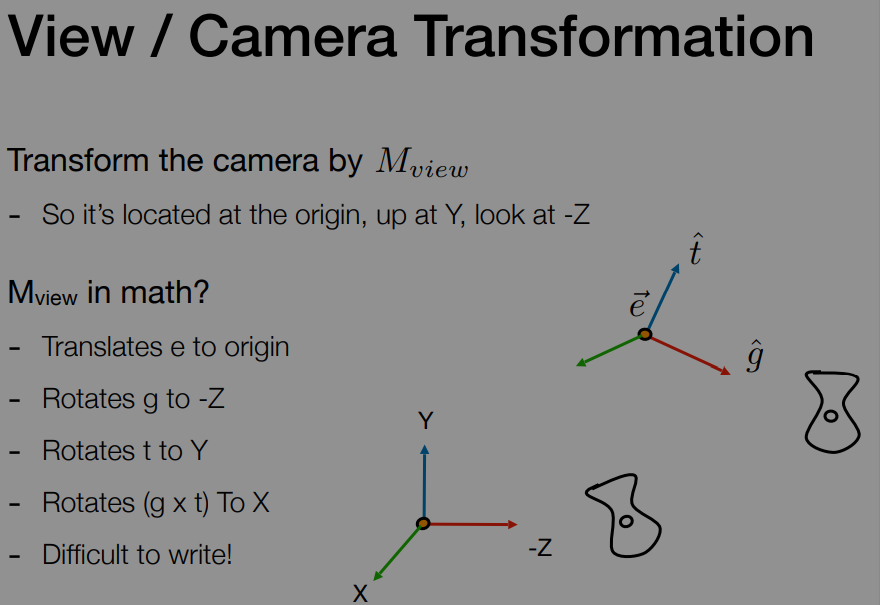
- 经过变换,把相机的位置移动到原点,同时保持看到的景物不变
- Think about how to take a photo
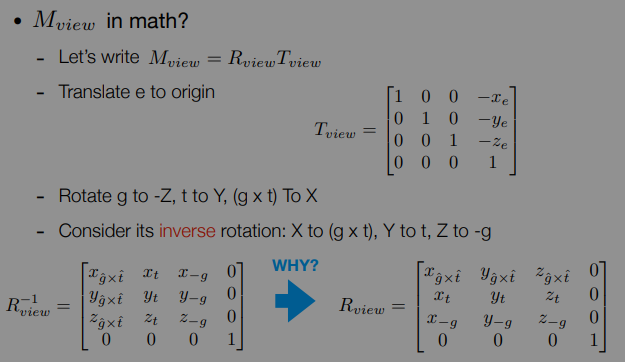
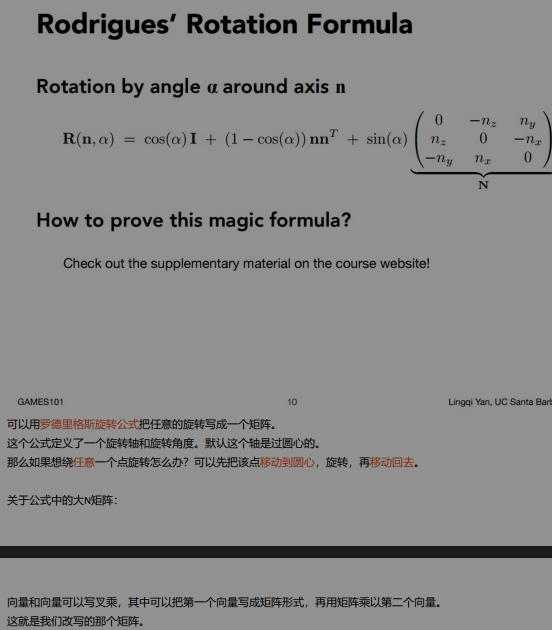
这个从“歪”的坐标轴旋转回正的坐标轴,不太好写。 但是这个变换的逆过程,即:从正的坐标轴旋转到“歪”的坐标轴,是好写的, 于是我们先写从“正”坐标轴变换到“歪”坐标轴的变换矩阵,再求其逆矩阵,就可以得到待求的变换矩阵。 又因为旋转矩阵是正交矩阵,所以他的逆矩阵就只需要转置一下就可以得到了! 注意,不但相机要做这个变换,其他物体也要做这个变换,因为我们想让相机看到的景物相对不变。 (以上部分个人认为非常巧妙和关键!)
Projection (投影) transformation
3D to 2D
Orthographic (正交) projection
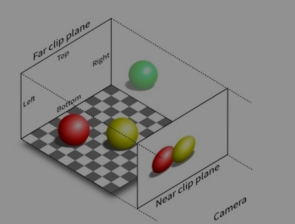
- 没有近大远小
- 平行投影
- 首先定义空间中一个立方体,将其translate,使其中心在原点,再scale成标准立方体(边长为2
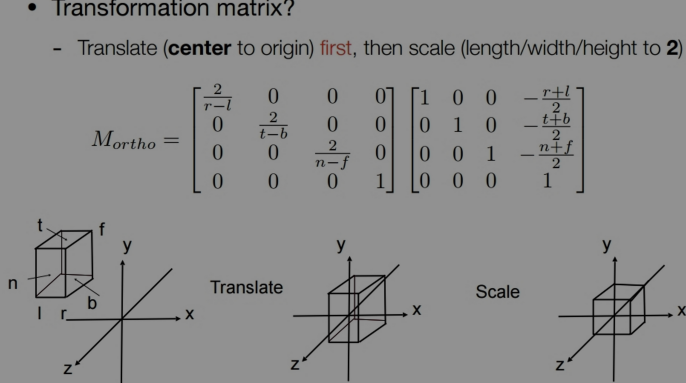
- 再次提醒,注意𝑧轴是近大远小 OpenGL等API是反过来的
Perspective (透视) projection
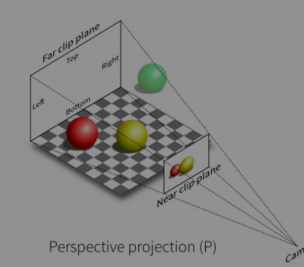
更像人眼看到的场景
Most common in Computer Graphics, art, visual system
Further objects are smaller
Parallel lines not parallel; converge to single point
- Recall: property of homogeneous coordinates
- (x, y, z, 1), (kx, ky, kz, k != 0), (xz, yz, z2, z != 0) all represent the same point (x, y, z) in 3D
- e.g. (1, 0, 0, 1) and (2, 0, 0, 2) both represent (1, 0, 0)
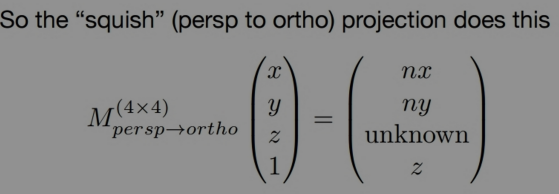
- how to do perspective projection
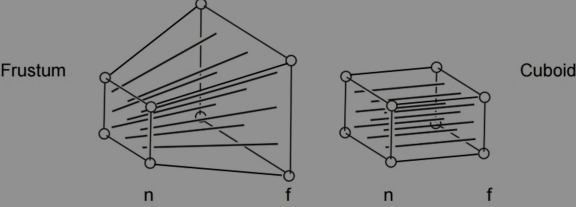
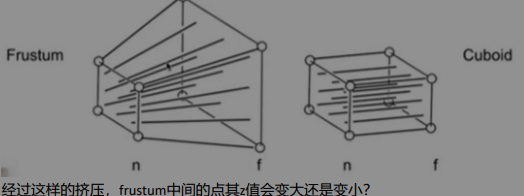
- 先将frustum远平面,挤压成和近平面一样大(从左图变成右图)
- 再做正交投影,投影到近平面
- 上述操作过程中几点假设:
- 1)近平面保持不变
- 2)z值保持不变,只是向内收缩
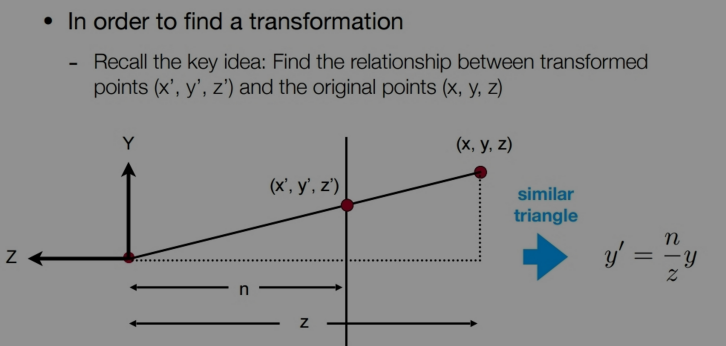
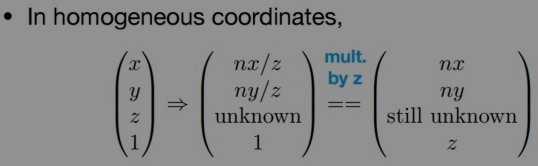
- 挤压这一步怎么做? 上图是从侧面观察frustum 用相似三角形知识可以得到新坐标的表达式,但是第三个分量目前还不知道(这里利用之前讲的那个性质: 齐次坐标,如果我们对点的坐标所有分量同时乘以k,他表示的还是原来那个点!
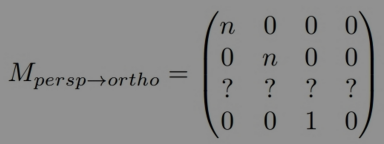
- 如何求解第三行
- 任何近平面上的点不会改变(也就是对于任意的(𝑥, 𝑦, 𝑛, 1),经过这个矩阵变换后,点的位置仍然不变)
- 任何远平面上的点,𝑧值不会改变
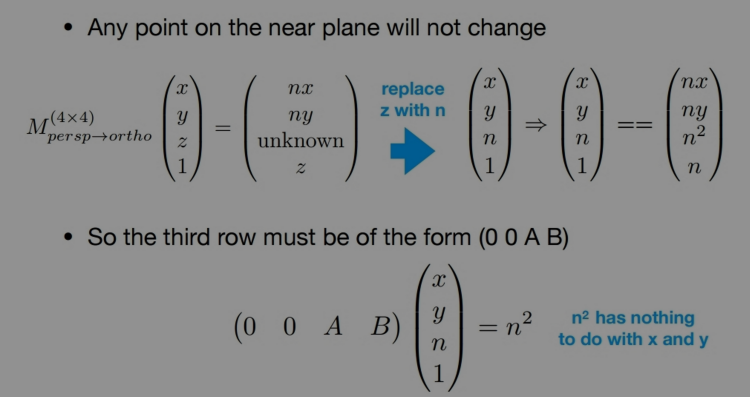
- 点(𝑥, 𝑦, 𝑧, 1)是可以通过矩阵变换得到(𝑛𝑥, 𝑛𝑦, 𝑢𝑛𝑘𝑛𝑤𝑜𝑛, 𝑧)向量的。 根据上文提到的性质(1),经过这个变换,点实际没有改变 而同时,(𝑥, 𝑦, 𝑧, 1)本身可以写成(𝑥, 𝑦, 𝑛, 1)(为什么把𝑧替换成𝑛?因为近平面的𝑧坐标就是都是𝑛,所以可以做这个替换。)然后同时乘以𝑛, 变成(𝑛𝑥, 𝑛𝑦, 𝑛 ଶ , 𝑛) 经过上面两个推导,可以看出,第三行前两个数一定是0 因为𝑛 ଶ这个分量和𝑥和𝑦都毫无关系,因此前两个数必定是0 这样,我们就解出了第三行前两个数,都是0 接下来求A和B
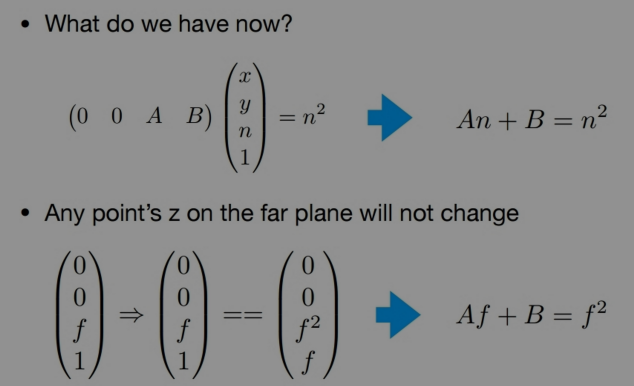
- 远平面上有一个特殊点,(0, 0, 𝑓)经过变换挤压仍然不变 所以(0, 0, 𝑓)经过变换仍然是(0, 0, 𝑓) 根据近平面我们得到$An + B = n^{2}$,根据远平面的中心点我们得到$Af + B = f^{2}

- 这样我们就能解出A和B了, 这样终于把从透视投影挤压成正交投影的矩阵,解出来了
思考题
Lecture05: Rasterization 1(Triangles)
Finishing up Viewing
- Viewport(视口) transformation
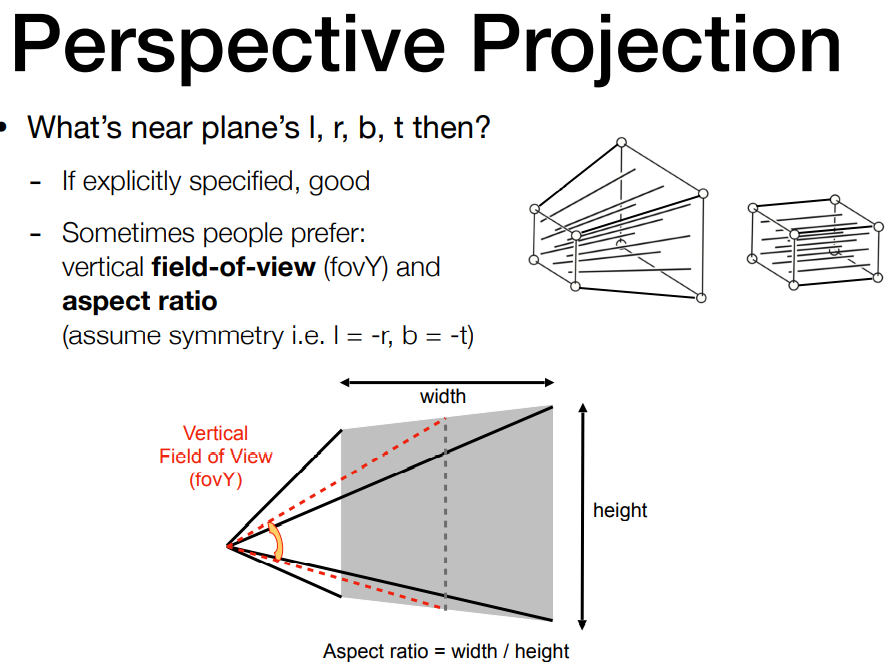
上节课把透视投影转化成正交投影 这里引入另外一个概念 Field of View,表示你能看到的角度的范围 注意看上图中红色线的夹角,就是垂直可视角度,他越大,可视角度越大 同理还有水平可视角度
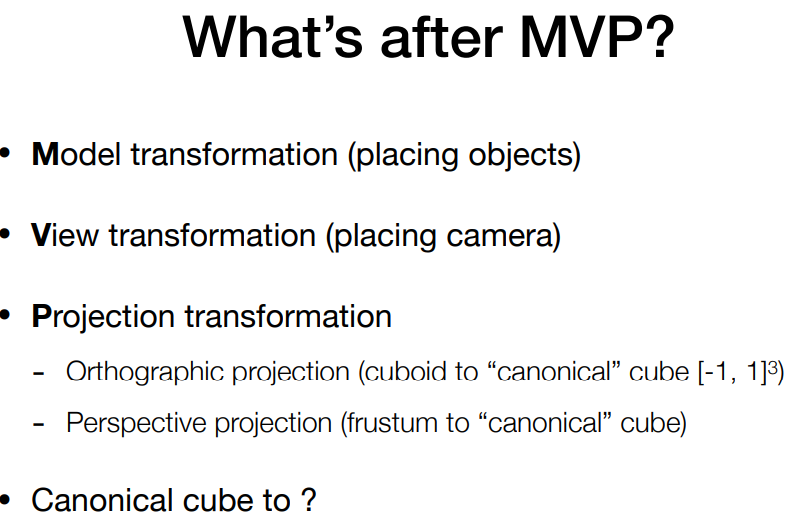
MVP这三个变换之后,所有东西都会停留在一个1,1,1的位于原点的标准立方体中 下一步就要把这立方体画在屏幕上
Rasterization(光栅化,即把东西花在屏幕上
屏幕
像素是最小的屏幕单位
每个像素有不同的颜色
屏幕空间:就是给屏幕定义一个坐标系 比如,可以定义左下角是原点。
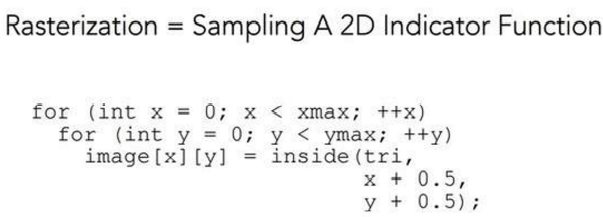
实际上像素的中心是(𝑥 + 0.5, 𝑦 + 0.5)
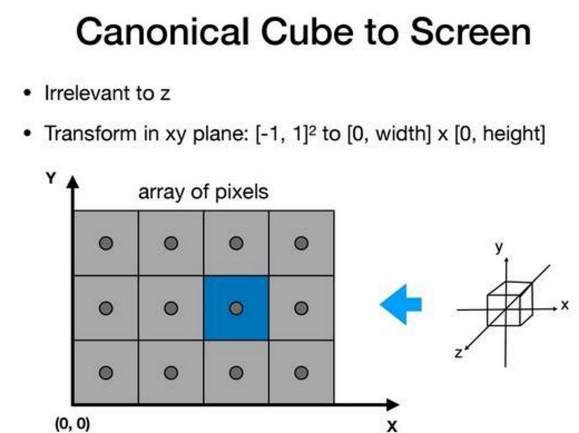
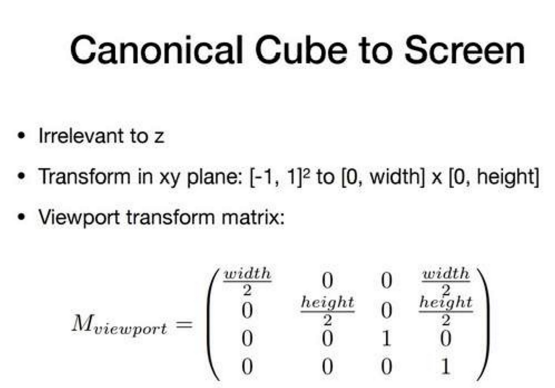
我们要做的就是把标准立方体空间映射到屏幕这个二维世界中去 𝑧暂时不管 其他两个坐标是[−1, 1] ଶ转换到 [0, 𝑤𝑖𝑑𝑡ℎ] ∗ [0, ℎ𝑒𝑖𝑔ℎ𝑡] 使用上面这个矩阵做变换
Rasterizing a triangle
三角形可以拼接在三维空间中的面,或者二维空间中复杂的图形
三角形内部一定是平面的
- 给三角形顶点定义不同属性,可以在三角形内部进行插值
- 通过采样的方式,来画出三角形
- 采样就是把函数离散化的过程
- 可以对时间,面积,方向,体积… 进行采样
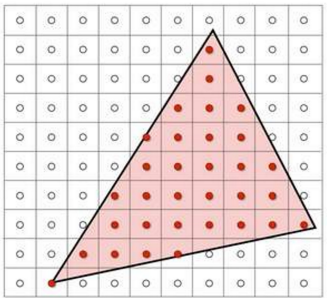
定义二值函数:
这里我们要做的就是给定一个三角形,判断像素中心是否在三角形内部。
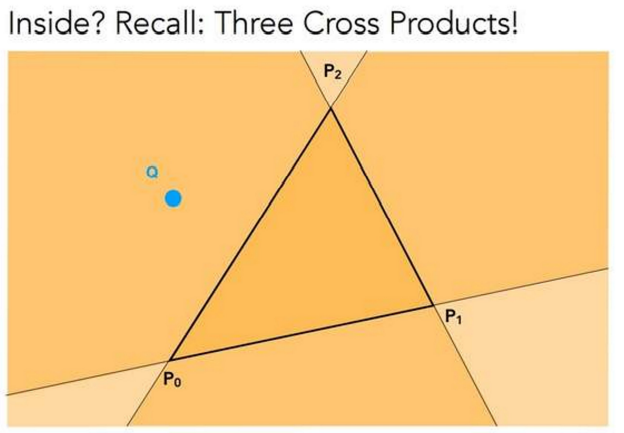
那么,如何判断一个点是否在三角形内?用叉乘!! 比如对上图,判断Q是否在三角形内部 首先$𝑃1𝑃2 \ X \ 𝑃1𝑄 $,将会得到一个z为正数的向量,也就是结果向量朝向屏幕外的,利 用右手定则,可以得知𝑄在𝑃1𝑃2的左侧(因为如果在右侧,那么结果将会是向量𝑧为负 数,那么结果向量就朝向屏幕内部) 类似的𝑃2𝑃0 𝑋 𝑃2𝑄,得到𝑄在右侧,不对劲! 𝑃0𝑃1 𝑋 𝑃0𝑄,得到𝑄在左侧
注意,向量按照一定的顺序去判断,比如我们上面是按照P1, P2, P0去判断的
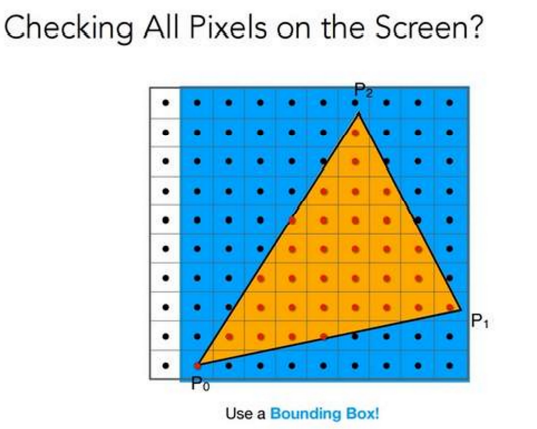
检查屏幕所有的像素太花时间! 可以只检查蓝色的包围盒(Bounding box)部分
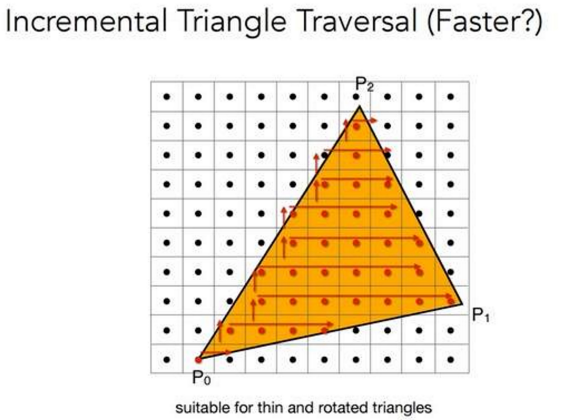
也可以每一行设置一个包围盒,进一步减小包围盒 很适用于那种三角形很小,但是包围盒很大的(窄长三角形